
CSIRO(Commonwealth Scientific and Industrial Research Organisation:
オーストラリア連邦科学産業研究機構)(オーストラリア ブリスベン)
ミュンヘン工科大学(ドイツ ミュンヘン)
2012年7月28日~2012年10月14日(79日間)
「送信と受信をペアにし単体で測距などが行えるように開発されたUWB送受信機を使った本研究は、CSIROにおいてプロジェクトとして成り立つかどうかを模索している段階の試みであり、そうしたチャレンジングな研究に取り組めたことはとても幸いでした。また日本国内でUWB技術を用いた無線装置を使用する場合(輻射電力が規定の許容値以上であれば)無線局免許が必要です。日本とは異なる規制を敷かれているオーストラリアでの実験の機会は貴重でした」。ここから研究の内容をご説明しましょう。
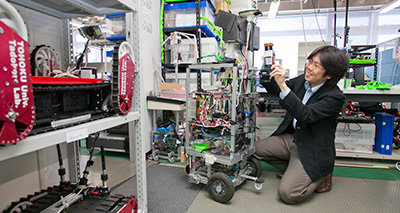
まずは、前ページでご紹介したDr. Elfesの占有度グリッドマップを応用し、レーザースキャナーとUWBセンサによる地図構築を検討しました。引き続き、実験装置として、ASLab研究員の協力により用意してもらった移動ロボットにUWBセンサを搭載し、移動計測が可能なものを製作しました(写真/図3)。
「UWBセンサの反射波形が場所に強く依存し、位相を含めた波形情報そのものを用いて相関を元にし、データベースと検索機能を構築することで、非常に高い精度・再現性を有する検索が可能であることが明らかになりました。位置推定精度は数ミリメートルという非常に高度なものでした。そこで研究の方向性を類似波形の検索に基づく位置推定に絞り、検索精度・再現性向上のための重み付け関数の設計・計測距離との関係性・計測周期の関係について、基礎実験を通して改良を重ねました。これにより非常に高い再現率、精度での類似波形検索が可能となりました。また得られた検索結果を用いてGraph-based SLAM手法により軌跡を修正することで、主観ではありますが精度の高い軌跡修正を実現しました。その結果をレーザースキャナーによる位置推定手法と比較すると、全体で概ね5センチメートル、(データベースに用いた軌跡のズレに起因するものと考えられる)最大20センチメートル程度の差で位置推定実現可能であることを示しました」。
今回の結果については、精度検証や誤差解析などまだ十分に練られていない箇所はあるものの、非常に興味深い結果が得られたことから国際学会への投稿論文としてまとめられました。「研究開始から投稿締め切りまで約1ヶ月しかありませんでしたが、Dr. Elfes を始めとするASLabメンバーの力添えにより一定の成果として論文に編むことができました。これまで英語論文を書くときは、日本語から英訳していたのですが、今回は章立てから英語で書いてみました。この方法のほうが効率が良いという発見もありました」。まとまった期間を海外で過ごすのは初めてで、渡豪前は不安に感じることもあったという竹内先生。心配は杞憂に終わり、とても充実した海外派遣になったようです。「若手にとって世界トップレベルの研究者は雲の上の存在です。とてもかなわないと心の障壁をつくってしまいがちですが、渡航期間中Dr. Elfesと近しくさせていただくことで、研究に対する姿勢や情熱、ワーク・ライフ・バランス、若手育成への熱意など多くのことを学べました。今はその背中をみているだけですが、いつか追い越してみたい存在となりました」。オーストラリアの空の下、青雲の志を抱いた竹内先生。ASLabとは今後も共同研究や人材交流を図っていくこととなり、竹内先生には架橋役としての役割も期待されています。

(写真/図3)移動ロボットプラットホームにUWBセンサを搭載し、キャンパス内で実験を行った。UWBは、壁などの遮蔽物や、霧や草むらなど見通しがきかない場所でも電波が回り込むため、電波が届く範囲での位置測定を行うことが可能。こうした特長は、空港のセキュリティチェックなどへの応用が期待されている。

(写真/図4)オーストラリアといえばコアラ、愛らしくユーモラスな姿で人気。写真のコアラが手にしているのは、主食のユーカリ。ユーカリはタンニンや油分が多く含まれており、消化が悪く、一般に動物の餌として適さない。コアラは匂いをかぎ、葉を選別してから食べるという。食物からは活動のための十分なエネルギーを得られないため、一日のうち18-20時間を樹の上 で眠ったり休んだりして過ごす。
本サイトに掲載されている個人情報は、本人の了解のもとに本サイトに限り公開しているものです。よって第三者がそれらの個人情報を別の目的で使用することや、本サイトの無断転載は固くお断りいたします。
