
ミュンヘン工科大学 制御工学研究所(ドイツ ミュンヘン)
2011年9月11日~2011年11月12日(63日間)
未知かつ危険な災害現場や宇宙空間など、人間の活動が制限される環境においては、ロボットの活躍が期待されます。複数のロボットが自立・自律的に協調して作業を行うには、高度な情報処理能力を有することが前提となりますが、現状ではロボットがその場で起こりうる無限の状況に応ずることは困難です。そこで人間の遠隔操作による関与を取り入れることで、複数のロボットを協調させる方法が模索されています。姜先生が続けます、「一対のマスターロボットとスレーブロボットで遠隔操作を行う研究はこれまで多くなされてきましたが、((写真/図3)のように)複数の操作者によるロボットを協調させる研究はあまり例が無く、実現に必要な理論も確立されていません。今回の派遣先は遠隔操作で著名なLSRということもあり、ぜひ“遠隔操作による複数のロボットの協調”に挑んでみたいと思いました」。
複数の人間により遠隔操作された、複数のロボットを協調させる制御方法としては〔集中制御〕〔分散制御〕のふたつが考えられます。「集中制御は、すべてのマスター・スレーブペアをつなぎ、状況を把握するコントローラを置くもので、これによりすべての操作デバイス、ロボットを一体として考えることができます。これは協調作業における安定性解析や操作性の確保などに優れる一方で、実際の応用にあたっては逆にコントローラの存在が、柔軟性を著しく低下させるという難点があります。言わば臨機応変な対応が難しくなるということですね」。「一方、コントローラを置かない分散制御は、操縦者の操作意識の差が協調性に大きく影響します。つまりお互いの“息を合わせる”制御がなければ、作業を続けることは不可能でしょう。人間の意識をどのように定式化し、それをどう克服するかは非常に大きな課題です」。ちなみに分散制御の仕組みで、遠隔操作されたロボットを協調させる試みはこれまでにあまりなされていません。「考え得る一つの方策として、作業を先導するLeaderロボットとそれに追随するFollowerロボットを事前に決めておくというものがあります。しかし例えば、私たちが数人で重い荷物などを運ぶ場合、Leaderの指示に従うだけではなく、『もう少しゆっくり』とか『ちょっと傾いている』など、自身の感覚と意識を相手にフィードバックしながら連携しようと努めます。そう考えるとLeader-Followerシステムのメリットをどう捉えるかも考えなければなりません」。
LSRでは、人間同士がお互いの力や視覚情報を通じて協調しあうメカニズムの解明などにも取り組んでいます。「二者間による実験では、単純に相手の意識に引っ張られていくよりは、お互いに競争しながら、与えられたタスク(この場合は、ボールを目標経路に沿わせる)を達成しようとするほうが、トータルでの作業精度や安定性がよいという結果が出ています。非常に興味深い結果でした」。姜先生は、帰国後も引き続き同テーマの研究に取り組んでいます。「双腕ロボットの遠隔操作研究のために開発されたシミュレータをリモデルし、6自由度ハプティックインターフェイスを同期させることで、バーチャル空間における作業評価用シミュレータを開発しています(写真/図4)。これからいよいよ考案した制御の評価に取り掛かっていきます」。姜先生が所属する研究室の教授をして“斬新かつチャレンジング”と言わしめた研究テーマは、これからどんな可能性を示してくれるのでしょうか。
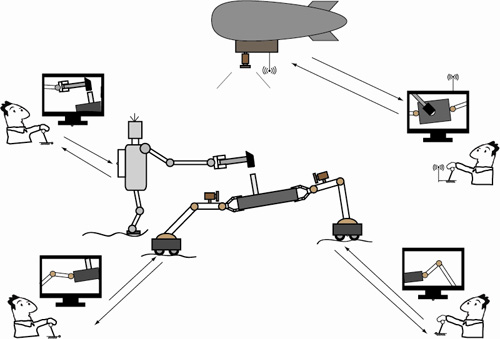
(写真/図3)遠隔操作による複数のロボットの協調、その概念図。文中に出てきたマスターロボットとは操縦者の手元にあるデバイス、スレーブロボットとは実際に現場で動く装置のこと。人間の関与が作業に影響を及ぼすので、協調させるにはどのような制御則の設定がふさわしいかを考究する必要がある。
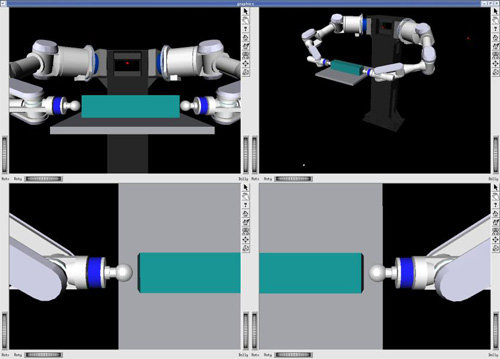
(写真/図4)「LSRでは、マスター・スレーブのペアを用いた把持実験を行うこともできました。帰国後はそうした知見とノウハウを生かし、研究室の博士課程学生とともに、二人の操縦者による遠隔操作の協調作業の研究を続けています。」。図は、双腕宇宙ロボットの遠隔協調用シミュレータ。
姜 欣(ジャン シン)
東北大学大学院工学研究科
機械システムデザイン工学専攻
内山/近野研究室 助教
1996年7月吉林省長春市実験高校卒業、2000年7月大連理工大学自動化専攻卒業、2001年10月大連理工大学大学院自動化専攻修士課程中退、2004年3月東北大学大学院工学研究科機械電子専攻博士課程前期2年の課程修了、2007年3月東北大学大学院工学研究科航空宇宙工学専攻博士課程後期3年の課程修了。博士(工学)。2007年4月より現職。
所属・役職は取材当時のものです。
本サイトに掲載されている個人情報は、本人の了解のもとに本サイトに限り公開しているものです。よって第三者がそれらの個人情報を別の目的で使用することや、本サイトの無断転載は固くお断りいたします。