


- IROS2008、LAAS-CNRS、ベルサイユ大学
2008年9月22日〜10月4日
人と向かい合い、共に生きる存在へ。
リアルワールドで活躍する、
協調型ロボットの開発をめざして。
キーワードは、ロボット@共生・協調、実社会。
両研究室が掲げるコンセプトは、「ロボット・パートナー」「ファンダメンタル・ロボット・テクノロジー」「リアルワールドRT(Robot Technology)システム」の3つ。それらの研究開発に向けて、多彩なアプローチを展開中ですが、代表的な取り組みをご紹介しましょう。
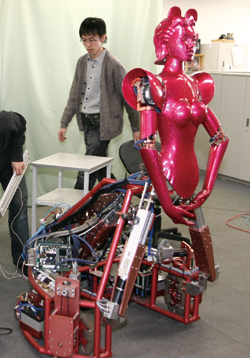
写真1 “晴れ着”の美しいスカートをはいていなくて残念。ダンスパートナーロボット「PBDR」は、独立行政法人新エネルギー・産業技術総合開発機構(NEDO)の援助を受け、野村ユニソン株式会社、株式会社トロワゾとの共同研究で開発された。
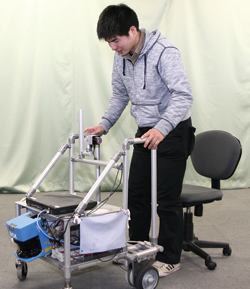
写真2 モーターを使わずに、人の押す力だけを駆動力とするRT Walker。ほどよい力で動き、行きたい方向を察知して車輪の軸を変える。

写真3、4、5 PRPの足元は、フリーローラーを組み合わせた全方向車輪。滑らかな動きをかなえているが、不整地や段差のある場所での走行は課題も。

写真6 高齢者が恐怖心を感じるような急な坂道でも、ゆっくりと下ることができるので安心&安全。
「あうんの呼吸」で。
人とロボットの協調をめざして
「ロボット・パートナー」
ダンスパートナーロボット「PBDR」、
RT Walker
「愛・地球博」※2で優雅にダンスを踊る姿を会場で、あるいはメディア等で見聞きされた方も多いかもしれませんね。社交ダンスは、男性が女性を主導し、女性はそのリードから意図するステップを推定します。このダンスロボットPBDR(写真1)も、それと同様の動きをするもので、内蔵された6軸力覚センサで3方向の力とモーメントを受け取り、あらかじめ記憶させておいたステップを基に、X、Y両軸方向の動きと回転の制御をします。技術とともに注目すべきは、独創的な意匠。これは、デザイン性を重視した両研究室と服飾デザイナーとのコラボレーションによって生まれました。ロボットは、もはや総合芸術ですね。
ダンスロボットの開発はさらに進展し、リードの間違いを検出して、運動を修正してダンスを継続するエラーリカバリー型、さらには、ステップを選択し、女性をリードする男性型ロボットダンサーも研究の途上にあります。「あうんの呼吸」で、人間とロボットはどこまで協調できるか、の模索が続きます。
また、Walking Helperとして、歩行に際して何らかの障害を持つ人の支援のために開発されたのが「RT Walker(Robot Technology Walker)」です(写真2)。これはサーボブレーキを利用したパッシブ型知的歩行支援システムであり、基本的に人の力だけで動く受動的なシステムをベースに、ロボットの要素技術を組み込むことで、高機能で安全、かつ信頼性の高いシステムを構築しています。人に寄り添うやさしいロボットは、これからの超高齢社会を文字通りサポートする存在になるかもしれません。
足元をしっかり。
ロボット基盤技術の確立に向けて
「ファンダメンタル・ロボット・テクノロジー」
パッシブ・ロボット・ポーター「PRP」
駆動力を持たない安全で機能的な物体搬送運搬システムは、家庭や福祉や介護の分野での活用が期待されます。PRP(写真3、4、5)は、力覚センサ、全方向車輪、サーボブレーキ、エンコーダからなり、適切な動きの指令を生成する運動制御アルゴリズムを構築したもので、その動きは驚くほどすみやかでなめらか。また、複数台のPRPに荷物を載せ(2台で300キログラムまでの荷重に耐える)、人と協調しながら運ぶ動作において、障害物を回避するなど、高い有効性を確認しています。
縁の下の力持ち。暮らしの中の身近なロボット
「リアルワールドRTシステム」
パワーアシスト自転車・三輪車
暮らしや社会の中で、実際に活躍できるロボット技術の研究開発をめざす、その名も「リアルワールドRTシステム」。そのひとつが電動自転車です(写真6)。これは坂道や風といった走行の障壁になる環境を「抵抗」と考え、その抵抗分をアシスト、補償するシステムです。上り坂ではパワーアシスト、下り坂ではブレーキをかけて、常に、“平地を無風状態で” 走行している感覚を保ちます。運転者の体力に応じたパワーしか出ないので、高齢者も安全に操作することができます。自転車は、環境負荷の少ないクリーンな移動手段として注目されており、製品化、市場デビューが待望されます。
- ※2
- 正式名称は、 2005年日本国際博覧会。2005年3月25日から同年9月25日まで、愛知県愛知郡長久手町・豊田市および同県瀬戸市の2会場で開催された。略称は「愛知万博」、愛称は「愛・地球博」。21世紀最初の国際博覧会(EXPO)であり、国内では大阪万博以来の2回目の総合的な博覧会となった。