

座学から実践へのテイクオフ!
大空に描くは、
努力とチームワークの軌跡。
図1 システム構成
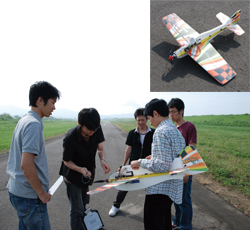
写真2、3 使用機体は、昨年度使用したものを引き継いでいる。Hyperion 社製のSNIPER。全長 1100ミリメートル、全幅 1000 ミリメートル、重量 565 グラム(制御モジュール除く)、翼面荷重 2.4 kg/㎡
図2 全自動で、ほぼ指定した目標点(Way Point)を経由して飛行させることに成功した。
チームARR「自律障害物回避飛行」
反省点多し。一方、来年は後輩に引き継ぎたい収穫も。
実は、両研究室での修士学生による航空ロボットの開発は、初めての取り組みではありません。東北大学大学院工学研究科航空宇宙工学専攻では、2006年度から大学院授業の一環として「Flight Test」を主眼に置いた実践型教育「航空宇宙フロンティア」を導入し、航空宇宙工学を広い視座から捉えることを学びの目標に据えてきました。両研究室の2007年度のテーマが「航空ロボット」。市販のラジコン飛行機に、学生たちが開発した制御モジュールを搭載し、あらかじめ指定した経路(ウエイポイント)に沿って自動で飛行させる飛行実験を行いました。
昨年度の開発期間は約1年。しかし、今回は半年という非常に限られた時間での活動です。航空ロボットのゼロからの開発、市販品の組み合わせ…とさまざまな選択肢が考えられましたが、何よりも時間内で自分たちの持ちうる力を表現し、創造性や特徴を打ち出していく必要があります。チーム全員で意見を交換して出した結論は、「ベースとなる機体は昨年度に利用した市販のラジコン機を再利用、基盤やセンサ類もできるだけ引き継ぎ、効率化を図っていく。しかし、新たに飛行プログラムの構築を行うことで、自分達の知識やスキルを発揮していこう」というものでした(図1)。先輩から後輩へ、努力と汗の結晶ともいえる機体のリレーです。
目標は「障害物を自律的に回避しながら飛行する航空ロボットの開発」。予期しない障害物を検知・回避することは、UAVの事故率を低下させ、安全性の向上に欠かせない性能です。まずは、評価指標となるサクセスレベルを設定。Minimumとして「経路飛行(航空ロボットの位置制御を可能にする)」、Fullを「仮想障害物回避飛行(障害物を検知できたと仮定し、回避飛行を行う)」、Extraに「センサを用いた障害物回避飛行(実際に障害物を検知し、回避飛行を行う)」としました。
角田滑空場で行った飛行実験(写真2、3)は合計5回。結果を総合すると、Minimumサクセスレベルは達成(図2)、Fullサクセスレベルは、回避飛行が実行される段階までは達成できたものの、衝突判定の領域に機体が入ってしまい、残念ながらExtraには挑戦できませんでした。
「このような達成度に留まった理由としては、授業等のスケジュールや天候条件により、十分な飛行実験が出なかったことが挙げられると思います。飛行実験を行わない限り、制御の妥当性を精査したり、次の段階の可能性を探ったりすることができません。実験の大切さを痛感させられました。また、私たちの進め方によって、遅延が生じたことも事実です。忘れ物をしたり、予期しない故障を現地で直せなかったり。事前準備を入念に行うことで、避けられたミスもありました」とは反省の弁。ただし、メンバー全員で協力して、効率よく作業が進められ、プロジェクトとしては高度に機能していた点はよかったとも。また、先輩からのノウハウの伝承・アドバイスで大いに助けられたように、次年度は、自分たちも後輩をサポートできる立場になりたいという頼もしい意見も聞かれました。