

座学から実践へのテイクオフ!
大空に描くは、
努力とチームワークの軌跡。
図3 システム構成
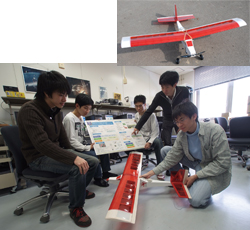
写真4、5 機体は、ムサシノ模型飛行機研究所製E・プレイリーL、機長 810 ミリメートル、翼長1195 ミリ、重量 745グラム(制御モジュール除く)、翼面荷重 2.4 kg/㎡。上の写真のポスターは、成果発表会のポスターセッションで使用したもの。
チームARL「自動離着陸飛行」
大破に負けず、実験を継続。
想定どおりの結果を手に。
チームARLのミッションは、遠隔操作無介入の完全自動離着陸の達成。これは大型機ではすでに実用化されているものの、小型機においては、世界的にも開発段階にあり、成功例はきわめて少ないものです。チームARLでは、昨年度の研修結果である経路飛行を踏まえ、サクセスレベルMinimumを「離着陸可能な機体の製作、センサデータの取得」、Fullを「離陸の自動制御」、Extraを「着陸の自動制御」と設定し、システム構成に取り組みました。
開発にあたっては、短期間で効率的に行うため、前述のチームARR同様に、機体は昨年度から引き継いで使用、制御モジュールに関しても、昨年度使用していたセンサ類と同様のものを購入し、プログラムを改良していきました(図3)。やはりここでも、チームの全員が昨年度の開発者からの説明を受け、先輩の成果に自分たちの努力を積み重ねていくこととなりました。また、同チームはさらに2グループに分かれてそれぞれの開発・作業を担いましたが、連絡を密にし、進捗状況を確認し合うなどの意思疎通を図ることにも力が注がれました。これはまさに、プロジェクトマネジメント力の養成のプロセス、そのものです。
機体は、前輪と尾輪に大きく改良を加え、自動離着陸に耐えうるものに。また、自動離着陸を達成するためには、機体の姿勢、位置など高度で精密な情報が必要であり、その各種情報に基づいて各サーボモーターへ適切な指令値を与える必要があります。システム構成(図3)にそって、方向制御、自動離陸制御等を実装して、いよいよ自動離着陸実験へ(写真6、7、8)。
結果は、Minimumサクセス、Fullサクセス双方について、内容をすべて達成することができました。Extraの「着陸の自動制御」については、対気速度が不足し、空力が十分に作用しなかったため、着陸時に大きな衝撃が生じてしまいましたが、ほぼ想定どおりに動作とデータを得ることができました。
この自動離着陸機開発の難しさを物語っているのが、墜落回数。全6回の飛行実験で、機体はたびたび落下し、1回の中波、2回の大破に見舞われました。まさに満身創痍ですが、破損はその日のうちに修理され、定期的な飛行実験に備えられました。スピーディーで確実な対応は、開発を支える基本スタンスです。

写真6、7、8 自動離陸実験の結果、完全自動制御による離陸に成功!