


- ARLISSカムバック・コンペティション
2008年9月15日〜9月19日
さぁ、深宇宙へ。
わが国の宇宙開発ミッションと結びつく
ロボットの研究開発に取り組む。
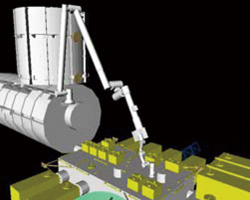
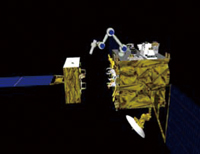
写真2、3 吉田・永谷研究室が取り組む「軌道上サービスロボット」のうち、衛星の回収や修理を行う「フリーフライングロボット」(上)、船外作業の補助を担う宇宙ステーション搭載マニピュレーター(左)
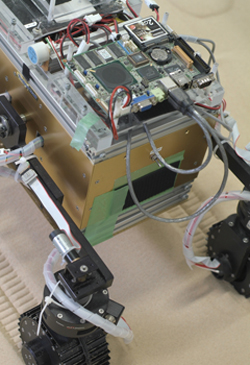
写真4 月・惑星探査ローバー、テストヘッド。こうした惑星探査ロボットの開発で培った不整地走行、遠隔操縦などの技術を応用して、地上での災害非常時における情報収集用ロボットの開発にも取り組んでいる。
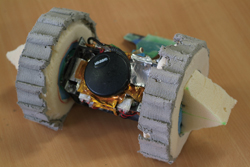
写真5 ボロボロのスポンジ車輪が、砂漠走行の厳しさを物語っている。
過酷な宇宙環境で、しなやかに
自在に動く惑星探査ローバーを。
吉田・坂本・中西/永谷研究室が取り組むのは、宇宙ロボット・惑星探査ロボットの研究。例を挙げれば、衛星軌道上サービスロボット※3のマニピュレーター※4、ならびに月・惑星などの地表面上を探査する移動ロボット(惑星探査ローバー)のダイナミクスの解明や、新しい機構/制御法の開発など。両研究室のアクティビティーは、宇宙航空開発研究開発機構(JAXA)の宇宙開発ミッションと深くかかわっていることで知られています。2003年5月、小惑星 1998SF36(イトカワ)をめざして打ち上げられた小惑星探査機「はやぶさ(MUSES-C)の技術開発にあたっては、計画当初から検討ワーキンググループに参画し、サンプル採集技術について、その方式の検討と決定に携わりました。また、東北大学大学院理学研究科と共同で開発が進められた「スプライト観測衛星」は、2009年1月、無事に宇宙へと旅立ちました(詳しくは36ページをご覧ください)。さらには、宇宙開発で培った技術を地上で応用する研究(防災・レスキューロボット)にも積極的に取り組んでいます。
以下では、惑星探査ローバーについて少し詳しくご説明しましょう。
2003年にアメリカ航空宇宙局(NASA)が打ち上げた2機の無人火星探査機(スピリットとオポチュニティ)は、今も火星を移動探査し、大きな成果を挙げています。一方、JAXAの長期計画には、月面探査が盛り込まれており、自律性の高い惑星探査ローバーの研究開発が急がれています。しかし、月面をはじめ多くの惑星の表面は、細かい砂で覆われているため、探査ローバーの走行制御を行うためには、スリップを考慮することが重要なポイントになります。そこで、軟弱地盤を走行するローバーの運動力学を明らかにするため、実験データに基づきながら、車輪と地面との間の力学関係のモデルを定式化。実ローバーを利用したテスト走行を繰り返すことで、そのモデルの妥当性を検証しています。
惑星探査ローバーの模擬実験と位置づけ、毎年チャレンジを続けているのが「ARLISS(A Rocket Launch for International Student Satellites :アーリス)」です。