

研究分野の知見に加えて、
人に優しいヨーロッパの
街の姿を学ぶ。
心揺らした感銘は、
これからの研究の道を支える基に。
研究者として、夢と情熱を注げる研究テーマに出会えた人は幸せだ。修士課程からロボット工学の世界に飛び込んだ海隅さんは「介護ロボットの研究開発に携わりたい」と明快な目標を話す。その背景には、不幸にも病を得、要介護者となった祖父の姿があった。「介護する人の負担だけではなく、される人の心苦しさや抵抗感を軽減したい」といった具体性の帯び方は、現場に臨んだ人の視点に立脚している。福祉先進国である欧州に向かった海外研修、そこで海隅さんが見て感じたものとは?
大学院工学研究科 バイオロボティクス専攻
平田研究室
海隅 亜矢さん 博士課程前期1年
人の器用さを実現。書道するロボットの研究開発。
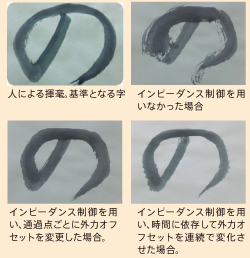
写真1
これまでロボット技術は主に産業分野や特殊環境(人間にとって好ましくない状況下)での応用が推進されてきましたが、近年、家庭用などより身近な分野へと拡大する傾向が顕著です。ロボットは、生産性の向上などに資する単一機能に特化することは得意な反面、動作の柔軟性、円滑さ、器用さにおいては乏しい面も否めません。機械工学フロンティア創成で海隅さんたちのグループが挑んだのは、ロボット書道によって人間の器用さの一部を実現する試みです。
まず外力に対し柔軟に動作する制御を行うインピーダンス特性と、与えた点を曲線で滑らかに描くことができるスプライン関数の制御プログラムを統合し、マニピュレータ(ロボットアーム)の基本制御系を構築します。次に、実際に人間が毛筆書道を行う動作を計測・解析し、その軌道を基にマニピュレータが動くべき、軌道と筆圧を生成。3パターンの実験を行いました(写真1)。結果は、目標軌道の追従にインピーダンス制御を加えることで、基準となる字とのズレは減少しましたが、残念ながらゼロになることはなく、課題が残されました。