


- ロボカップ2009グラーツ世界大会
2009年6月29日〜7月5日
人の力の及ばない災害現場に、
人間の英知と知見で立ち向かう。
レスキューの地平を切り拓く
ロボット開発の最前線へ。

写真4 Kenafそろい踏み。「Pelican」は共同開発チームのユニット名。
世界が相手だ!
額に汗した機械工学フロンティアの取り組みは、4つのトロフィーに結晶。
『Kenaf』(写真4)は、多自由度の全身クローラ(履帯)型ロボット。広い範囲を高速に移動し、瓦礫などの不整地や階段などを踏破することができる高い運動性能を持っています。しばしばロボットの障壁となる段差などは、全身を覆っているクローラと4本のサブクローラを用いることで乗り越えることが可能です。
機械工学フロンティアの柱として掲げたレスキューロボットの「自律移動」と「遠隔操縦」、それぞれの開発戦略と達成度、大会結果についてご紹介しましょう。
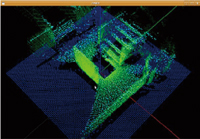
写真5 計測データ
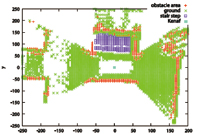
写真6 判定結果。紫は階段、赤は壁、緑は地面と判定。
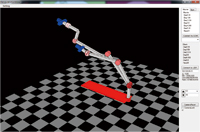
写真7 操作PCに映し出される画面。マスターアーム、スレーブアームそれぞれの形状がリアルタイムに表示される。
図1
自律移動
人の操作に依らない自律移動は、「環境認識・目的地決定」「自己位置推定」「障害物回避」の3つのシステムが鍵となります。
環境認識・目的地決定については、搭載した3次元スキャナで計測したデータを基に、階段や壁などを判定(写真5、6)。また、地面をグリッドに区切って高さ情報を付加し、環境の凹凸を表現するDigital Elevation Map (DEM)を用い、地面と階段を区別しました。3次元空間における自己位置推定は、エンコーダ(クローラベルトの回転数)、3軸ジャイロ※3、3軸加速度センサ、3次元スキャナによるセンサシステムを構築し、推定した位置の誤差を小さくできる、地形情報を利用した手法を採用しています。そして、3次元スキャナにより周囲の障害物を認識し、その座標と目標の方向から障害物を迂回・回避する経路を生成し、目的地へと移動させます。
遠隔操縦
今大会はマニピュレータ※4性能も審査の対象に加えられることなったため、“腕ロボット”を中心とした遠隔操作の戦略を構築しました。まず、操作の簡便性のために「マスタースレーブ」と呼ばれるシステムを採用。これは、オペレータが手元におかれたマスターアームを動かし、実際に作業を行うスレーブアーム(Kenaf側)の運動を制御するもので、操作者(オペレータ)の作業を支援するマン・マシンインターフェースといえます(写真7)。制御システムに関しては、マスターアームからKenaf内のモータドライバ(マイコン)制御プログラムまでを作成(図1)。千葉工業大学に製作を依頼したスレーブアームが、大会までに間に合わないというアクシデントにも見舞われましたが、代用機器で臨機応変に対応し、いざ大会へ。
図2 達成度

写真8 汗と努力の結晶。輝く4つのトロフィー。
「自律操縦」「遠隔操縦」、機械工学フロンティアにおける達成度は図2の通り。そして、『ロボカップ2009グラーツ世界大会レスキュー・ロボットリーグ』では、
- 総合部門 準優勝
- 革新的運動性能・センサ性能・マニピュレータ性能・インタフェース性能部門 優勝
- 運動性能部門 優勝
- 自律性能部門 準優勝
という素晴らしい栄誉を手にしました(写真8)。